Development and Support
As autonomous driving systems are being developed from the perspective of reducing traffic accidents and ensuring mobility for the elderly, and as global technological competition intensifies, there are technological areas in which Japan should collaboratively develop in order to lead the world.
The Next Generation Mobility Group is engaged in the following research and development as a project in the cooperative area led by the government.
Development of Safety Assessment Methods for Autonomous Driving Mobile Services
In order to conduct safety assessments with the aim of realizing autonomous driving mobile services in a wide variety of regions, we are working to study ODD setting methods and safety assessment methods that will contribute to appropriate and efficient safety design and functional verification of autonomous driving vehicles, as well as to service deployment in other regions, by assuming a specific business model for autonomous driving services.


Automated Valet Parking System
What is an Automated Valet Parking System?
The automated valet parking system is a system in which a control center that manages the entire parking lot and vehicles is linked with sensors installed in the vehicles and parking lot to allow vehicles to get in and out of the parking lot at locations that provide convenient access to adjacent facilities and buildings. Using driverless operations, the system functions to move vehicles to designated parking locations, parks the vehicles, and drives the vehicles out of the parking lot.
Since the need to get in and out of the vehicle in the parking space is eliminated, doors do not need to be opened nor closed, which is expected to reduce the vehicle parking space and increase parking efficiency relative to the parking lot area. In addition, the elimination of the need to search for empty parking spaces is expected to alleviate the issue of wandering vehicles causing congestion in surrounding streets. In addition, since the parking space for driverless automatic valet parking is a dedicated use space that excludes people and regular vehicles, vehicle theft prevention and zero accidents in the parking lot can be simultaneously attained.
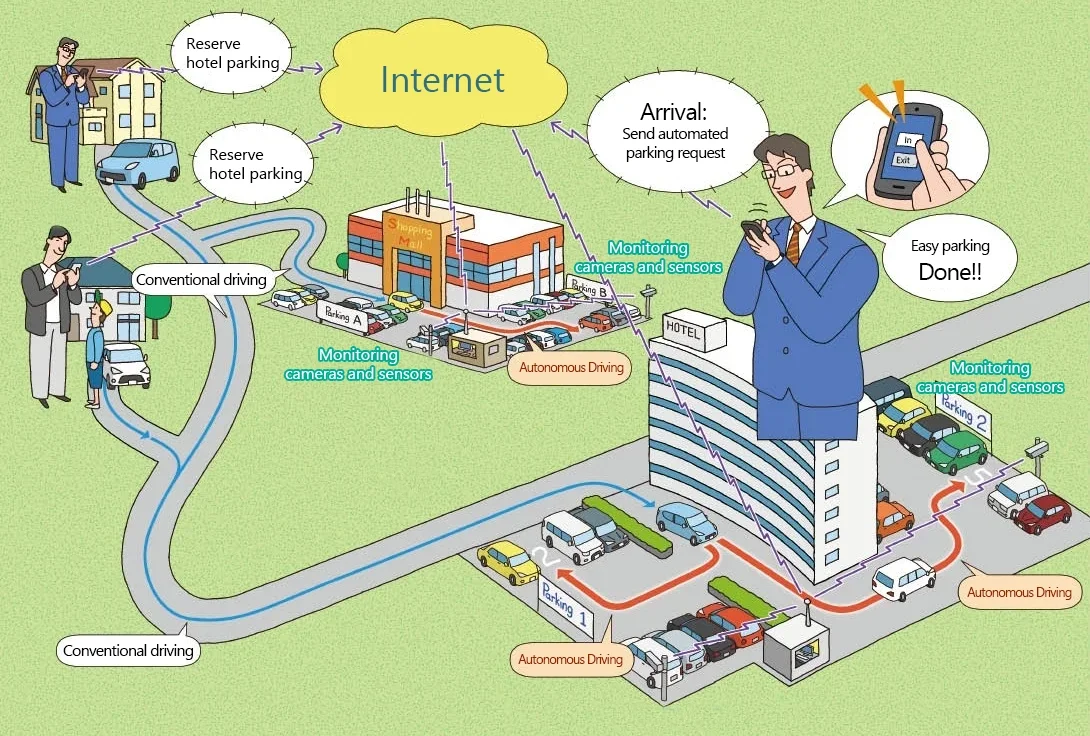
How automatic valet parking works
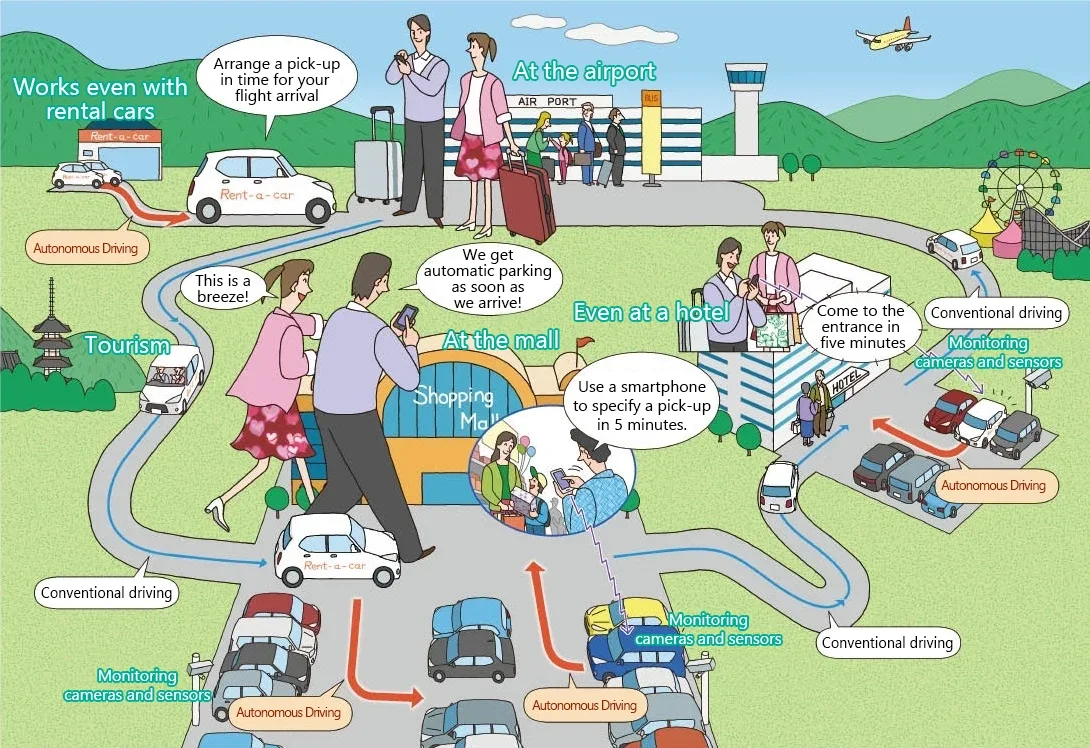
Use cases for automated valet parking (examples)
This video explains the purpose of the project and anticipated benefits of the project.
JARI conducts research aimed at the application and practical use to industrial vehicles of autonomous driving technology developed through the Energy ITS Promotion Project (research and development of autonomous driving and parallel-driving technology), such as automated valet research for the practical use of automated parking.
Activities
To achieve automated valet parking, the system consists of a vehicle capable of autonomous driving and automated parking, a control center that safely and efficiently guides the vehicle along its route, and parking infrastructure, including equipment and sensors to ensure safety in the parking lot, and the necessary cooperative integration of all three of these components.We are studying the optimal division of roles among these components, specifying standard specifications for the entire automated valet parking system, developing safety standards, control technologies, and operation management technologies that can be used as standard by each primary participant, and developing simulations to verify the effectiveness of these technologies.
In addition, since international collaboration is an essential aspect of implementing this system, we will actively propose international standardization of the specifications, and even make use of simulation technology to verify the social benefits, such as easing traffic congestion on roads surrounding parking lots and reducing wait times to enter parking lots.
Operational Support System for Highway Tunnel Lights Cleaning Vehicle
By isolating only the lateral control technology from the truck formation driving technology of the Energy ITS Promotion Project (commissioned by NEDO), which was implemented from FY2008 to FY2012 with the main objective of reducing CO2 emissions, it will be possible to provide operational support for work vehicles such as highway maintenance vehicles.
JARI conducted joint research from FY2011 to FY2015 with the Central Nippon Expressway Company on the application of this technology to tunnel light fixture cleaning vehicles, which clean light fixtures in tunnels by spraying high-pressure water vapor at them.
Cavitation vehicles that spray high-pressure water onto light fixtures in tunnels to clean them must maintain a constant distance between the light fixture and the spray nozzle in order to sustain the cleaning effect. Therefore, the steering wheel angle is controlled to keep a constant and accurate distance between the white line, identified by the camera, and the vehicle.
As a result, we confirmed on a test course that the target performance of a high vehicle speed (up to 80 km/h), high distance accuracy (±15 cm), and curved roads (over R300), which has been difficult to achieve with the work of a human operator, can be achieved by improving the white line tracking control algorithm and other factors. To actually operate this technology on public roads to improve the efficiency of cleaning operations, further tests are needed to confirm white line recognition performance in public road tunnels (effects of sudden changes in illumination intensity at entrances and exits, white line deterioration, etc.) and white line tracking performance (effects of curvature and cant changes).

Tunnel light cleaning vehicle and steering support system

Automatic white line tracking and automatic steering test for tunnel light cleaning vehicles (proving ground)
Click here for presentation materials from the Central Nippon Expressway Company
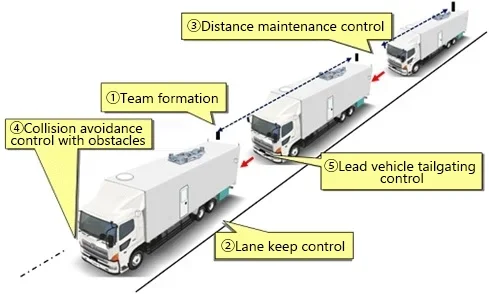
Truck Formation Driving
JARI was commissioned by the New Energy and Industrial Technology Development Organization (NEDO) to conduct the Energy ITS Promotion Project (R&D on automated driving and formation driving technology) for five years from FY2008 to FY2012, with the aim of energy conservation in the transportation sector. In implementing the project, JARI served as the coordinator of joint research with 15 organizations from industry, academia, and government, and succeeded in developing automated driving and formation driving technology for four trucks at a speed of 80 km/h and a distance of 4 m between vehicles.
Experimental vehicle developed under the Energy ITS Promotion Project

View of experimental formation driving
View of experimental formation driving (video)