自動走行システムの研究開発
交通事故低減や高齢者のモビリティ確保などの観点から自動走行システムの開発が進められており、グローバルな技術競争が激化する中、日本が世界をリードする上で、協調して開発すべき技術領域があります。
政府が先導する協調領域の事業として、新モビリティ研究部では、以下の研究開発に取り組んでいます。
自動運転移動サービスの安全性評価手法の構築
自動運転移動サービスを多種多様な地域で実現することを目指しその安全性評価を実施するべく、具体的な自動運転サービスの事業モデルを想定し、自動運転車両の安全設計や機能確認の適正かつ効率的な実施、そして他地域でのサービス展開にも寄与するようなODD設定方法やセーフティアセスメント手法の検討に取り組んでいます。


自動バレーパーキング
自動バレーパーキングシステムとは
自動バレーパーキングシステムは、駐車場に隣接する施設や建物へのアクセスが便利な場所で車両の乗り降りができるようにするため、駐車場や自動車など全体の管理を行う管制センターと、車両や駐車場に搭載・設置されたセンサなどが連携し、無人運転により指定された駐車場所へ移動したり、駐車、出庫をドライバに代わって自動的に行ってくれる機能です。
駐車場所での乗り降りがなくなることからドアの開閉が不要になり、車両駐車スペースを小さくして駐車場面積に対する駐車効率を上げることが期待されております。さらに、駐車場の空きスペースを探す必要がなくなることから、周辺道路での「うろつき渋滞」も緩和されることが期待されております。また、無人運転を行う自動バレーパーキングの駐車スペースは専用空間となっており、人や一般車両を排除した空間であるため、車両の盗難防止や駐車場内の事故ゼロを同時に達成することができます。

自動バレーパーキングの構成
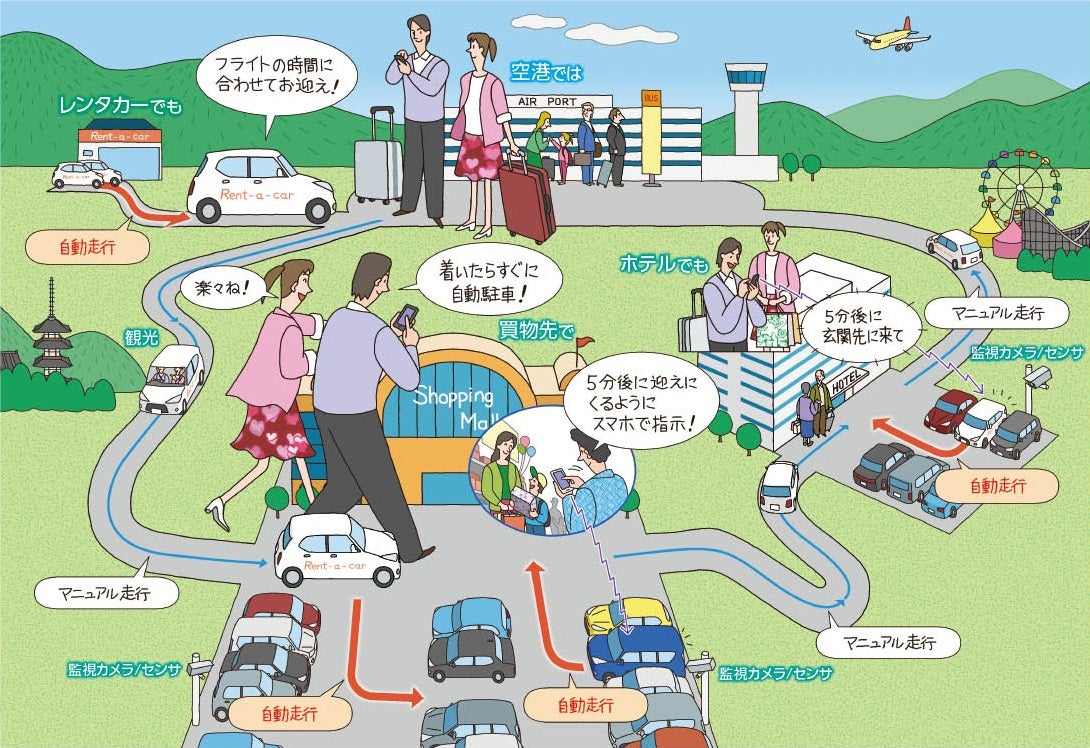
自動バレーパーキングの活用シーン(例)
事業の目的や期待される効果を紹介したビデオを公開しています。
JARIでは、自動駐車の実用化に向けた自動バレー研究などエネルギーITS推進事業(自動運転・隊列走行技術の研究開発)で培った自動運転技術を活用した産業車両への応用・実用化を目指す研究を実施しています。
活動内容
自動バレーパーキングを実現するためには、自動運転・自動駐車ができる「車両」、その車両を安全かつ効率的に経路誘導する「管制センター」、駐車場の安全を確保するための機器やセンサなどの「駐車場インフラ」で構成され、その3者が協調することが必要となります。それらの最適な役割分担を検討し、自動バレーパーキングシステム全体の標準仕様を具体化するとともに、それぞれの主要な関係者が標準的に利用できる安全基準や管制技術、運行管理技術の開発、および、それらの効果を検証するシミュレーションの開発に取り組んでいます。
また、このシステム実現には国際的な協調が重要な領域であることから、その仕様については積極的な国際標準化提案を行い、さらにシミュレーション技術を駆使した駐車場周辺道路の渋滞緩和や入庫待ち時間の短縮などの社会的な効果検証まで行っていきます。
2018年11月13日~15日に「自動バレーパーキング機能実証実験」を公開しました。詳しい報告はこちらをご覧ください。
高速道路トンネル照明清掃車運転支援システム
CO2削減を主目的に2008~2012年度に実施した「エネルギーITS推進事業(NEDOから受託)」のトラック隊列走行技術から、横方向の制御技術のみを切り出すことで、高速道路の保全車両など産業車両の運転支援を行うことが可能になります。
JARIでは、トンネル内の照明灯具に高圧の水蒸気を噴射して洗浄する「トンネル照明灯具清掃車両」にこの技術を応用する共同研究を中日本高速道路株式会社様と2011~2015年度に行いました。
トンネル内の照明具に高圧水を噴射して洗浄するキャビテーション車両は、洗浄効果を維持するために、照明具と噴射ノズルの離隔距離を一定に保つ必要があります。そこで、カメラで認識した白線と自車の距離を精度良く一定に保つようにハンドル角を制御します。
その結果、白線追従制御アルゴリズムなどの改善により、従来のオペレータ作業では難しかった高い車速(最大80km/h)、高い距離精度(±15cm)、曲線路(R300以上)という目標性能を達成できることをテストコースで確認しました。清掃作業の効率化のために、この技術を実際に公道運用するには、さらに、公道トンネルでの白線認識性能の確認(出入口の照度急変、白線劣化などの影響)、白線追従性能の確認(曲率やカント変化の影響)などが必要です。
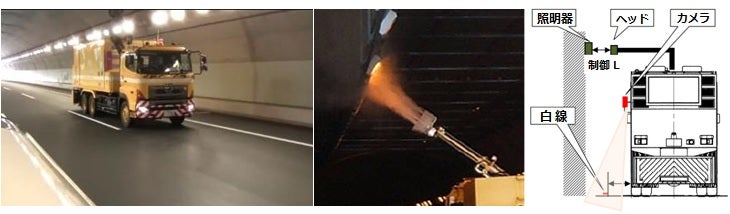
トンネル内照明清掃車と操舵支援システム

トンネル内照明清掃車両の白線追従自動操舵試験(テストコース)
中日本高速道路(株)発表資料はこちら
トラック隊列走行
JARIでは、2008~2012年度までの5年間、運輸部門の省エネルギー化を目的とした「エネルギーITS推進事業(自動運転・隊列走行技術の研究開発)」をNEDO(新エネルギー・産業技術総合開発機構)から受託しました。プロジェクトの実施にあたって、JARIは産学公15機関の共同研究先の取りまとめ役となり、時速80km、車間距離4mでの、トラック4台の自動運転・隊列走行技術の開発に成功しました。
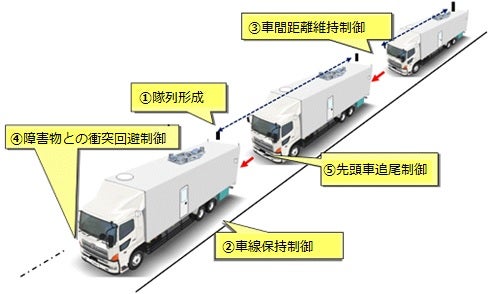
エネルギーITS推進事業で開発した実験車両

隊列走行実験風景
隊列走行実験風景(動画)
