安全
近年、交通事故の発生件数、死者数、負傷者数は着実に減少してきていますが、政府による第11次交通安全基本計画と、それを受けて取りまとめられた「交通政策審議会陸上交通分科会自動車部会報告書(2021年6月)」に掲げられた目標の達成に向けたさらなる取り組みが期待されています。そのためには、これまで同様に、事故実態の多角的な分析に基づく「低減目標の設定」と、それを踏まえた「人」、「道」、「車」に関するさまざまな「対策の実施」および「効果の評価」を繰返し行う安全対策推進のサイクルに継続して取り組むことが重要と考えられます。 JARIは、こうした安全対策推進の一連のサイクルの中で、「車」の安全に関するさまざまな研究・評価事業を一層推進することで、交通事故死傷者数の削減に貢献していきたいと考えています。
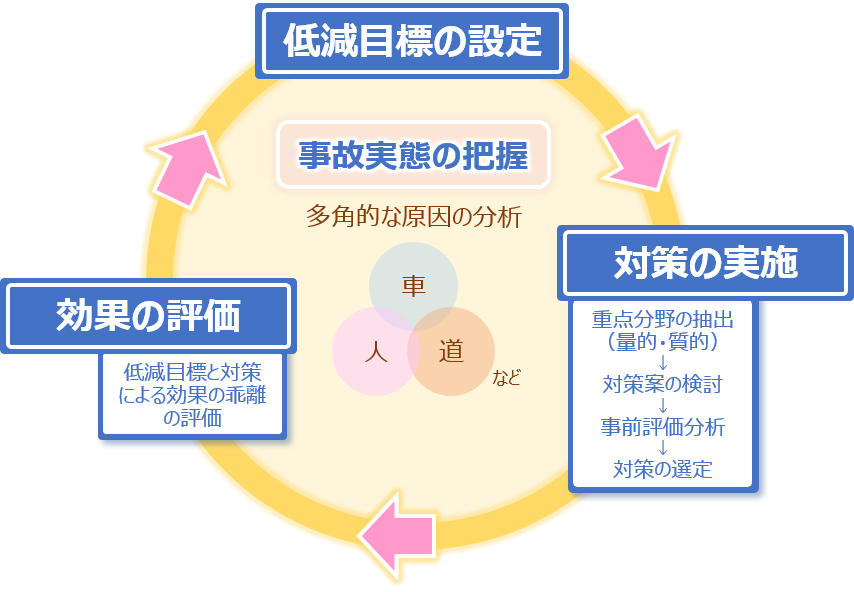
事故実態に基づく安全対策の推進イメージ
Cycle of the vehicle safety measures
安全研究事業においては、交通事故の実態を正確に把握するための交通事故統計を用いた各種分析はもちろんのこと、乗員や歩行者をコンピューター上で表現した人体モデルを用いた傷害発生メカニズムに関する研究に加え、機械学習手法を用いて実際の事故が発生した際の傷害程度を予測する手法の研究に取り組んでいます。また、関係機関との連携による自動車乗員や歩行者の保護性能評価試験に使用されるダミーやインパクタの開発・評価に関する研究に加え、社会問題化している高齢ドライバーによる事故要因に関する研究やバスの運行時の車内における乗客の安全確保に関する研究にも取り組んでいます。
安全評価事業においては、安全研究を通じて得られた知見を活かし、自動車アセスメント事業における①前面衝突試験および側面衝突試験による乗員保護性能評価や衝突後の感電保護性能評価、②衝撃試験による後面衝突時の頚部保護性能評価および歩行者の頭部・脚部保護性能評価、③チャイルドシートの安全性能・使用性評価などの各試験を担当しています。この事業では、対象の拡大を意図した試験評価法の見直しが継続的に図られており、こうした変化に柔軟に対応することで、「車」に関する対策である自動車の衝突安全性能のさらなる向上に貢献できると考えています。
最近では、自動運転技術に大きな期待が寄せられており、国内外で産官学の連携による、様々な取り組みが急速に進展しています。自動運転技術分野の研究として、交通実態に基づく、自動運転車が走行中に生じる交通外乱(他車からの割込み、歩行者飛び出し、など)の安全性の評価方法の検討や、自動走行システムが性能限界を超えた走行環境になった場合・システムに失陥が生じた場合のドライバへの運転交代について、ドライバの覚醒度の検知方法や、覚醒度や走行場面に応じた交代方法、システム状態をドライバに伝えるHMIなど、運転交代を円滑に行う研究等も行っています。
AEBS(Autonomous Emergency Braking System:衝突被害軽減制動制御装置)に代表される先進安全技術の性能評価を自動車アセスメント事業を2014年度より開始、これまでに、対車両および対歩行者(夜間を含む)のAEBS、車線逸脱抑制装置、ペダル踏み間違い時加速抑制装置等の評価試験が実施しています。2022年度からの対自転車AEBS評価、本格実施に向けた準備のほか、今後想定される、様々な装置が運転に介入した場合のドライバの反応についても研究を行っています。
従来のドライビング・シミュレータに加え、より現実の運転感覚に近いJARI-ARV(Augmented Reality Vehicle:拡張現実実験車)を開発、さらに、自動運転技術の開発・評価に活用可能な自動運転評価拠点「Jtown」を運用しています。運転支援装置や自動運転車が普及した際の事故低減効果の予測が可能なシミュレーションソフトの開発を行っています。ロボット等移動体については、ドローンの安全性評価や配送ロボットのリスクアセスメントに関する研究を行っています。また、「ロボット安全試験センター」にて、走行試験、EMC(電磁両立性)試験、対人安全性試験、強度試験など開発に必要な一連の試験が実施可能です。
これらのほか、タイヤ試験装置を用いた転がり抵抗試験、テストコースでの制動試験など、自動車に関する基本的な性能に関する各種試験など、自動車の予防安全に関する様々な試験・研究に対応しております。

拡張現実実験車(JARI-ARV)による実験
Test using augmented reality vehicle (JARI-ARV)

全方位視野ドライビングシミュレータ自動運転実験風景(濃霧高速道路)
Test on omni-directional viewing driving simulator for automated driving (dense fog highway)
主な試験/設備
衝突安全
自動運転・運転支援
生活支援ロボット・介護ロボット
